
Near Infrared Free-Running Single Photon Detector - GW-NRFR1M User's Manual
Brief description
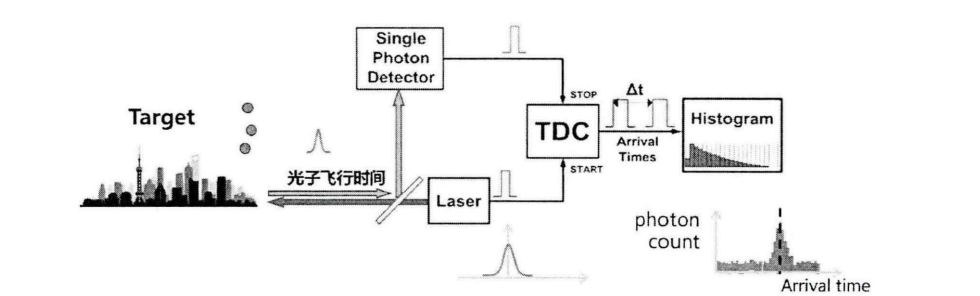
Time-Correlated Single-Photon Counting (TCSPC) technology, based on single-photon detectors (SPD), can effectively detect the timing information of weak echo signals in LiDAR. The principle of TCSPC is illustrated in the figure: LiDAR emits high-repetition-rate pulsed laser toward the target, measures the flight time of the backscattered photons, and then accumulates the discrete signals detected over several cycles into a histogram, which can reconstruct the waveform of the weak optical signal. By using single-photon counting technology (TCSPC) in 3D imaging LiDAR, the imaging distance of conventional LiDAR can be increased to around 10 km.
In LiDAR, because the arrival time of backscattered photons is random, it is necessary to operate the InGaAs/InP SPAD in free-running mode. The most common way to achieve a free-running single-photon detector is to connect a large resistor in series at one end of the SPAD to form a negative feedback quenching circuit. When an avalanche signal occurs, the avalanche current generates a voltage drop across the resistor, lowering the voltage across the SPAD below the avalanche voltage, thereby quenching the avalanche process. In general, parasitic parameters of the quenching resistor can cause significant afterpulsing effects, greatly reducing the practicality of such detectors.
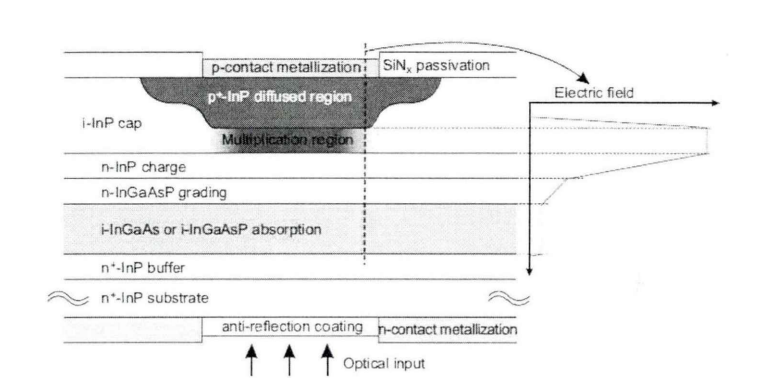
In measurements of cloud layers using multimodal LiDAR systems, the 1.5 μm laser is suitable for long-distance detection due to its higher atmospheric transmittance and lower sky background radiation, but this also results in extremely weak backscattered echo signals. To address this, the system uses single-photon avalanche diodes (NFADs) based on InGaAs (indium gallium arsenide) material. InGaAs is a III-V compound semiconductor, and its core advantage lies in the ability to precisely 'tailor' the material's bandgap by adjusting the ratio of indium (In) to gallium (Ga), thereby customizing the photon wavelength to which it responds.
For this measurement, a 1.5 μm near-infrared laser was used (this wavelength is a 'eye-safe' band that ordinary silicon-based detectors can hardly respond to). The customized InGaAs material was tuned to efficiently absorb photons in this band. Its working principle is that when a single photon, scattered from distant clouds and with extremely weak energy, is absorbed by InGaAs, it excites an 'electron-hole pair.' This carrier pair is accelerated in a strong reverse electric field slightly above the 'breakdown voltage,' triggering an avalanche chain reaction through impact, ultimately amplifying the single-photon signal millions of times to form an electrical pulse that can be accurately measured.
It is precisely this single-photon level, ultra-high sensitivity detection capability that converts 'a photon' into 'a clear electrical signal' that allows the system to capture and identify extremely weak echo signals completely undetectable by conventional detectors, thereby successfully achieving clear and continuous high-resolution detection of targets within high-altitude clouds 10 kilometers away, even after penetrating up to 3 kilometers of lower clouds.
Practical application
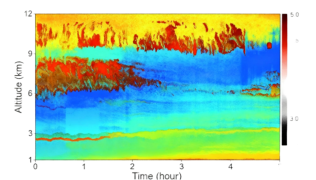
From 0:00 to 5:00 on March 24, 2018, our measurement team conducted a 5-hour continuous observation of the cloud layer using a multi-mode LiDAR system. The observation data is shown in Figure 1. The strong signals at the lower layers are the scattering signals from aerosol particles within the boundary layer.
During the observation period, the boundary layer thickness gradually increased from 2.5 km to about 3.2 km. Two layers of clouds and their evolution over time were observed above 6 km. Thanks to the high atmospheric transmittance of the 1.5 μm laser, after passing through the approximately 3 km thick lower cloud layer, we were still able to measure the internal concentration distribution of the high clouds at 10 km.
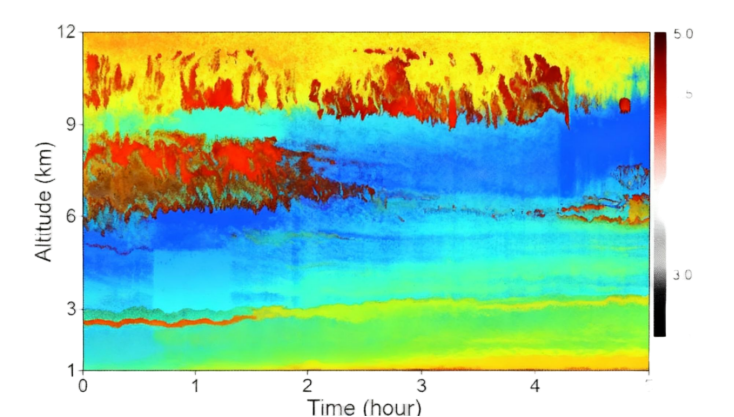
Figure 1 Continuous observations of clouds using a 1.5μm aerosol lidar
The entire system weighs approximately 15 kg, has a time resolution of 1 s and a distance resolution of 15 m, and is capable of continuous observation of multi-layer clouds within 12 km.
The system operates smoothly thanks to the single-photon detector's ultra-high sensitivity at the single-photon level. It can not only effectively capture the faint photon signals that traditional detectors cannot detect, but also detect extremely weak echoes. The lidar receives extremely weak echo signals scattered by aerosols and clouds in the atmosphere, which is the fundamental premise for detecting clouds at distances of 12 kilometers or even farther.
In addition, the single-photon detector also integrates a high-precision time-to-digital converter (TDC) internally, enabling high-precision timing, with each detected photon being marked with an exact arrival time. By calculating the time difference between the laser emission and photon reception, the distance to the scattering target can be accurately determined, achieving a high distance resolution of 15 meters and clearly distinguishing the structure of multi-layer clouds. When used in aerosol lidar applications, the single-photon detector only needs to be cooled to 0℃; however, for data reliability, the cooling temperature can be lowered to -50℃, which can be achieved using TEC cooling. To minimize the detector's size, weight, and power consumption as much as possible, our team specially designed a miniaturized InGaAs free-running single-photon detector based on TEC cooling for experiments. As shown in Figure 2, a copper tube clamp for installing the NFAD is affixed with thermally conductive glue to the cold end of a six-stage TEC, and then the whole assembly is installed into an 8×8×5 cm cooling box. The area of the detector's main control board was reduced to 9.5×14 cm through optimized design. The final overall dimensions of the detector are reduced to 10×15×6 cm, with a weight of approximately 1 kg and power consumption of about 30 W. The detector integrates a TDC with 10 ns precision to collect radar signal data, which is uploaded to the PC host computer via a USB interface.
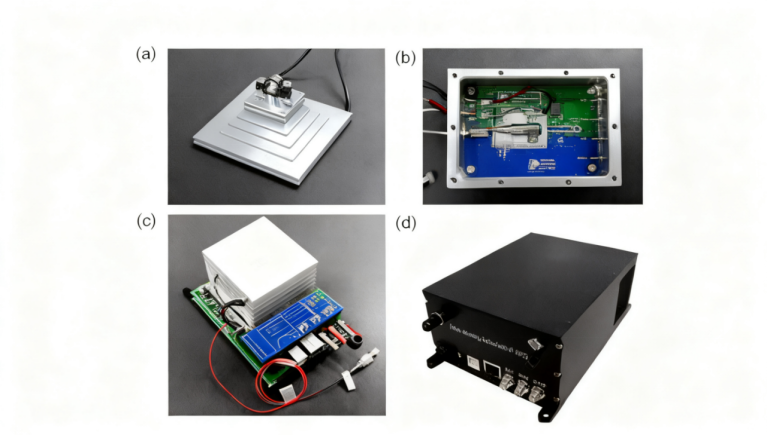
Figure 2 Miniaturized single-photon detector design. (a) TEC cooler for installing NFAD; (b) cooling box design; (c) overall internal design of the detector; (d) photo of the miniaturized detector prototype
T1 Laser Interferometric Absolute Gravimetry Main Configuration List
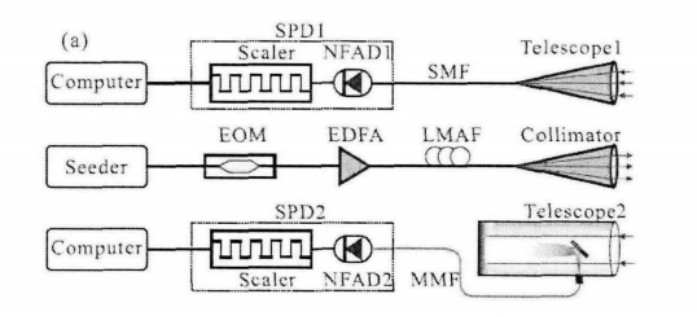
NFADs are divided into single-mode fiber coupling and multi-mode fiber coupling types. In aerosol lidar, the field of view of the receiving telescope is generally slightly larger than that of the transmitting telescope to ensure that all backscattered signals can be received. For single-mode fibers, only lenses with shorter focal lengths and telescopes with small diameters can be used to meet the field of view requirements, whereas multi-mode fibers have a larger numerical aperture and can meet the field of view requirements even when using telescopes with larger focal lengths and larger apertures, thus offering higher collection efficiency. In addition, atmospheric turbulence has a more significant impact on the coupling efficiency of single-mode fibers, while the coupling efficiency of multi-mode fibers is more stable.
To compare the final detection performance of the two coupling methods, we used the same micro-pulse emission device to set up different receiving systems for single-mode and multi-mode coupled InGaAs SPDs, as shown in Figure 3. The pulse emission device is the same as previously described, with an emitted laser pulse repetition rate of 10 kHz, pulse energy of 30 μJ, pulse width of 100 ns, and beam divergence angle of approximately 40 μrad. The single-mode NFAD receiving telescope has a diameter of 70 mm and a field of view of 50 μrad, while the multi-mode NFAD receiving telescope has a diameter of 150 mm and a field of view of 80 μrad.
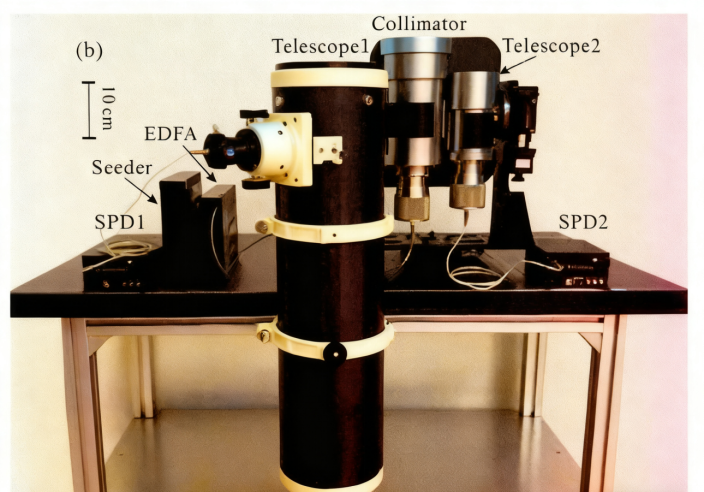
Figure 4 Echo signals measured by single-mode and multi-mode receiving systems
Figure 4 shows the echo signals detected at the same time by two receiver systems when a LIDAR observes vertically upwards. The receiver field completely covers the transmitted field after 1.5 km, with aerosol backscatter signals within 4 km and multilayer cloud backscatter signals at 9–12 km. From the figure, it can be seen that the waveforms measured by the two systems are basically the same, but the echo signal intensity measured by the multimode receiver system is about five times stronger than that of the single-mode receiver system.
The correction process for detector noise is basically consistent with the previous assumption, and the correction results are shown in Figure 5(a). In this experiment, there was a noticeable upward tail in the detection signal, which was caused by the amplified spontaneous emission (ASE) of the EDFA. ASE noise is generally coupled into the receiving system in the near field. However, as it gradually increases over time, and since the LiDAR signal’s range information is also encoded in time, a large amount of ASE noise accumulates at the tail of the LiDAR signal. The time-dependent amplitude of ASE noise is shown in Figure 5(b), and within our data range, it can be well fitted using an exponential function. During the experiment, we found that there were no clouds in the 13–15 km range. Using data from 13–15 km, the actual ASE noise intensity can be determined and used for ASE noise correction, as shown in Figure 5(c). The signal after detector noise correction and ASE correction is shown in Figure 5(d). Compared with the original signal, the signal-to-noise ratio is significantly improved, and the cloud scattering signals in the 10–12 km range are clearly visible.
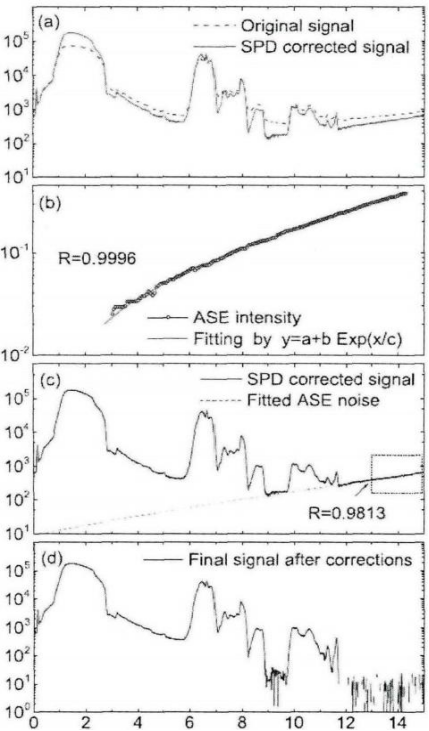
Figure 5 Data processing procedure: (a) Original signal and detector-corrected signal; (b) ASE noise fitting; (c) ASE noise correction; (d) Final signal after detector and ASE corrections
The 1.5 μm aerosol lidar is an ideal tool for cloud detection due to its advantages of being eye-safe, having strong atmospheric penetration, and low background radiation. However, limited by the weak 1.5 μm echo signal detection technology, the maximum detection range currently achievable in this wavelength is only 6 km, and no commercial products are yet available. Moreover, widely used commercial cloud lidar systems (such as the Vaisala CL31) still operate at the 910 nm wavelength, with a maximum detection range of 7.6 km and a weight of up to 30 kg. In comparison, the above system weighs only 15 kg, has a time resolution of 1 s and a range resolution of 15 m, and has already achieved continuous observation of multi-layer clouds within 12 km.
Near Infrared Free-Running Single Photon Detector - GW-NRFR1M User's Manual