
近红外自由运行单光子探测器 -GW-NRFR1M用户使用说明书
简述
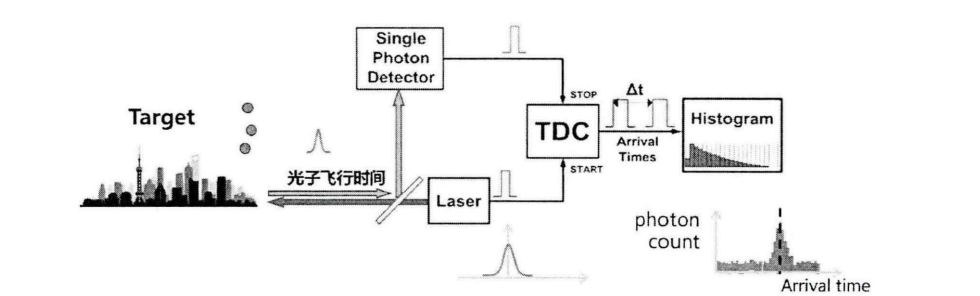
基于单光子探测器 (single-photon detector,SPD)的时间相关单光子计数技术(Time-Correlated Single-Photon Counting,TCSPC)可以有效探测激光雷达微弱回波信号的时间信息。TCSPC的原理如图所示,激光雷达向目标发射高重复频率的脉冲激光,测量后向漫反射光子的飞行时间信息,然后将若干个周期探测到的离散信号累积成直方图,便可以还原微弱光信号的波形。在利用单光子计数技术(TCSPC)的三维成像激光雷达,可将传统激光雷达的成像距离提高到了10 km左右。
在激光雷达中,由于后向散射的光子到达时间具有随机性,需要使InGaAs/InP SPAD工作在自由运行模式。实现自由运行模式单光子探测器最常用的方式是在 SPAD一端串联一个大电阻形成负反馈淬灭电路,当雪崩信号产生以后,雪崩电流在电阻上产生压降,SPAD两端的电压降低至雪崩电压以下,雪崩过程随即被淬灭。一般情况下,淬灭电阻的寄生参数会导致巨大的后脉冲效应,大大降低了该类探测器的实用性。
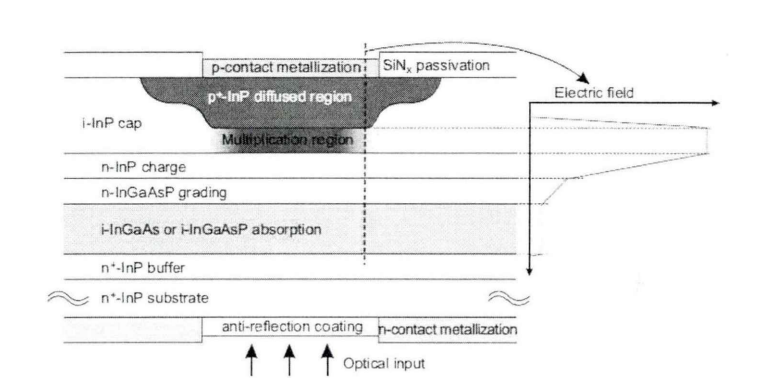
在多模激光雷达系统对云层的测量中,1.5 μm激光因其较高的大气透过率和较低的天空背景辐射而适合远距离探测,但同时也导致其后向散射回波信号极其微弱。为此,系统采用了基于InGaAs(铟镓砷)材料的单光子雪崩二极管(NFAD)。InGaAs是一种III-V族化合物半导体,其核心优势在于可通过调节铟(In)和镓(Ga)的比例来精确“裁剪”材料的禁带宽度,从而定制其响应的光子波长。
针对本次测量使用的1.5 μm近红外激光(该波长是普通硅基探测器几乎无法响应的“人眼安全”波段),定制的InGaAs材料被调整为能高效吸收此波段的光子。其工作原理是,当一个来自遥远云层散射的、能量极弱的单个光子被InGaAs吸收后,会激发产生一个“电子-空穴对”;该载流子对在略高于“击穿电压”的反向强电场中被加速,通过撞击引发雪崩式的链式反应,最终将单个光子信号放大数百万倍,形成一个可被准确测量的电脉冲。
正是这种将“一个光子”转化为“一个明确电信号”的单光子级别超高灵敏度探测能力,使得系统能够捕获并识别传统探测器完全无法察觉的极微弱回波信号,从而成功实现了在穿越厚达3公里的底层云后,仍能清晰且连续高分辨率地探测到10公里处高层云内部结构的目标。
实际应用
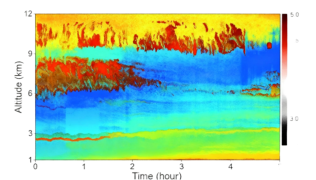
2018年3月24号0:00~5:00我们的测量团队使用多模激光雷达系统对云层进行了5小时的 连续观测,观测数据见图1。底层的强烈信号是边界层内气溶胶颗粒的散射信号,
在观测时间内边界层厚度从2.5 km 逐渐增高至3.2 km 左右。在6 km以上观测到了两层云随时间的演化过程。得益于1.5 μm 激光较高的大气透过率,在穿越约3km 厚的底层云之后,我们仍然测量到了10 km 处的高层云内部浓度分布。
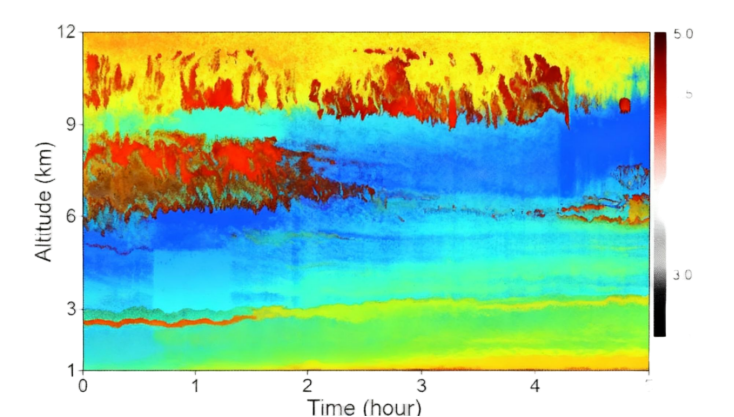
图1 1.5μm气溶胶激光雷达对云层的连续观测结果
整个系统重量约15 kg, 具有1 s时间分辨率和15 m距离分辨率,并实现了对12 km以内的多层云层的连续观测。
系统得以顺利运行,归功于单光子探测器拥有单光子级别的超高灵敏度,不仅能够有效捕获这些传统探测器无法察觉的微弱光子信号,而且能够探测到极微弱回波,激光雷达接收的是大气中气溶胶和云层散射的极其微弱的回波信号,这是实现12公里乃至更远距离云层探测的根本前提。
除此之外,单光子探测器内部还集成了高精度时间数字转换器(TDC),实现高精度计时,每个被探测到的光子都会被标记一个精确的到达时间。通过计算激光发射与光子接收的时间差,可以精确计算出散射目标的距离,从而实现15m的高距离分辨率,能够清晰分辨出多层云的结构。使用单光子探测器的应用于气溶胶激光雷达时只需制冷到0℃即可,不过为了数据的可信度,制冷温度到-50℃,而该温度使用TEC制冷即可达到。为了尽可能减小探测器的体积、重量和功耗,为此我们团队专门定制设计了基于TEC制冷的微型化InGaAs 自由运行模式单光子探测器用于实验。如图2所示,用于安装NFAD的铜制管夹被导热胶粘在六级TEC冷端,然后整 体安装进8×8×5cm 的制冷盒内。探测器主控板的面积经优化设计后缩小为9.5×14 cm。最终探测器整机尺寸降低到10×15×6 cm, 重量约1 kg,功耗约30 W。探测器集成10 ns精度TDC, 用来采集雷达信号的数据,通过 USB 接口上传到PC 端上位机。
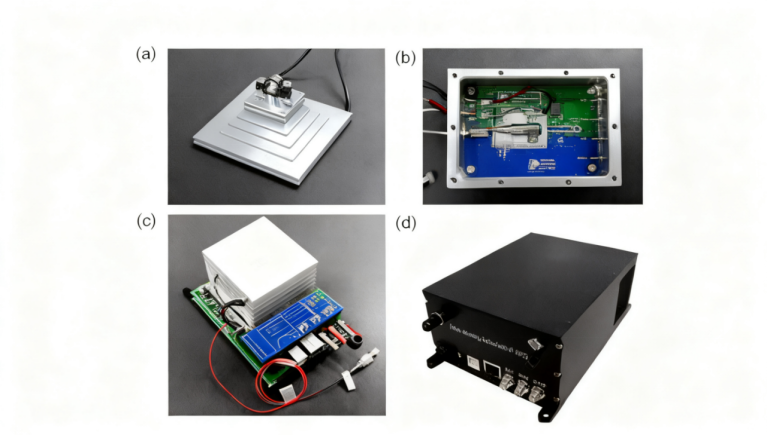
图2 微型化单光子探测器设计。(a)用于安装NFAD 的 TEC 制冷器;(b) 制冷盒设计;(c)探测器内部整体设计;(d) 微型化探测器样机照片
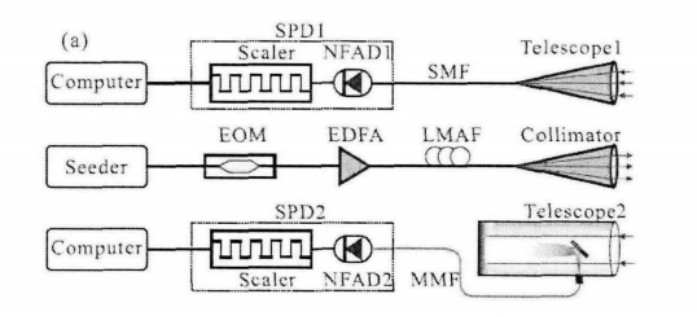
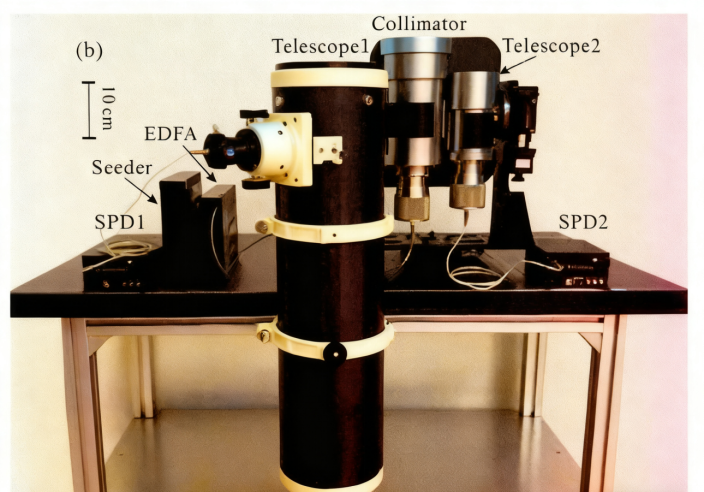
图3 (a)小型化气溶胶激光雷达原理图;(b) 小型化气溶胶激光雷达实物照片
NFAD 分为单模光纤耦合和多模光纤耦合两种类型。在气溶胶激光雷达中,接收 望远镜的视场角一般要略大于发射望远镜的视场角,以保证能接收到所有的后向散射信号。对于单模光纤而言,只能使用较短焦距的透镜和小直径的望远镜以满足视场角 的需求,而多模光纤具有更大的数值孔径,在使用较大焦距和较大面积的望远镜时同 样能满足视场角需求,因此具有更大的收集效率。此外,大气湍流对单模光纤耦合效 率的影响较为明显,而多模光纤的耦合效率则更加稳定。
为对比两种耦合方式最终探测效果的差异,我们使用同一个微脉冲发射装置,为单模耦合和多模耦合的InGaAs SPD搭建了不同的接收系统,如图3所示。脉冲 发射装置与前面所述相同,出射激光脉冲重复频率10 kHz, 脉冲能量30 μJ, 脉冲宽度100 ns, 光束发散角约40μrad。单模NFAD接收望远镜直径70 mm, 视场角50 μrad, 多模NFAD接收望远镜直径150 mm, 视场角80μrad。
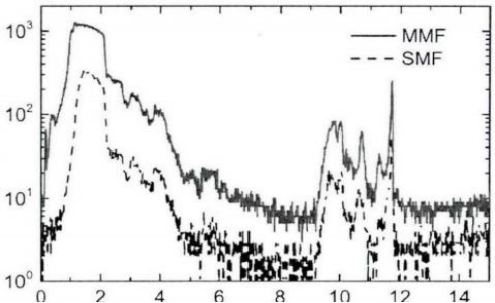
图4 单模接收系统与多模接收系统测得的回波信号
图4展示了激光雷达垂直向上观测时两套接收系统测到的同一时间的回波信号。 接收视场在1.5 km之后完全覆盖发射视场,4 km以内为气溶胶后向散射信号,9~12 km 处为多层云的后向散射信号。从图中可以看出,两套系统测得的波形基本一致,但多模接收系统测得的回波信号强度比单模接收系统强5倍左右。
探测器噪声的修正过程与前面推测基本一致,修正结果见图5(a)。在该实验中,探测信号的尾部出现了明显的上翘,这是由EDFA的自发放大辐射 (amplified spontaneous emission,ASE)导致的。ASE噪声一般是在近场处耦合进接收系统,但由于其随时间逐渐增强,而激光雷达信号的距离信息也使用时间编码,大量ASE噪声叠加在了激光雷达信号的尾部。ASE噪声的幅度随时间变化的关系如图5(b) 所示,在我们的数据范围内使用指数函数可以对其进行较好的拟合。在实验过程中,我们发现13~15 km处没有云层出现,使用13~15 km处的数据可以拟合出实际ASE噪声强度,进行ASE噪声修正,如图5(c) 所示。经过探测器噪声修正和ASE修正后的信号如图5 (d)所示,与原始信号相比信噪比明显提高,10~12 km 范围内的云散射信号清晰可见。
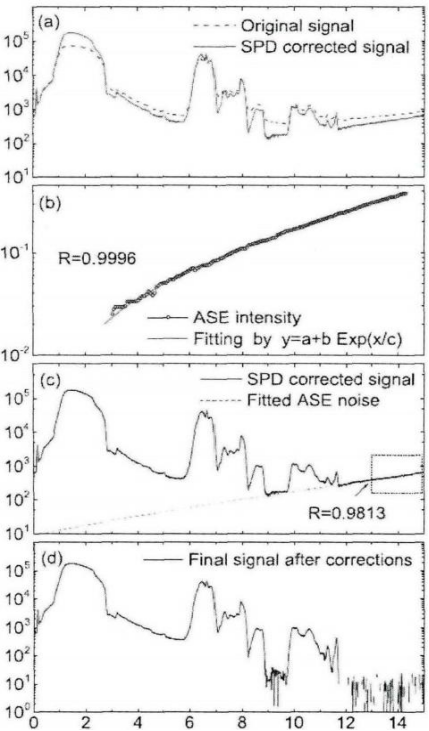
图5 数据处理过程:(a)原始信号与探测器修正信号;(b)ASE 噪声拟合;(c)ASE 噪声修正;(d) 经探测器修正和ASE修正后的最终信号
1.5 μm气溶胶激光雷达因具备人眼安全、大气穿透性强及背景辐射弱等优势,是测云的理想工具,然而,受限于微弱的1.5μm回波信号探测技术,目前该波段最远探测距离仅达6 km,尚无商用产品问世。且,当前广泛应用的商用测云激光雷达(如Vaisala CL31)仍工作在910 nm波段,其最远探测距离为7.6 km,重量高达30 kg。而上述这个系统重量却只有15 kg, 1 s时间分辨率和15 m距离分辨率,并且已经实现对12 km以内的多层云层的连续观测。